{
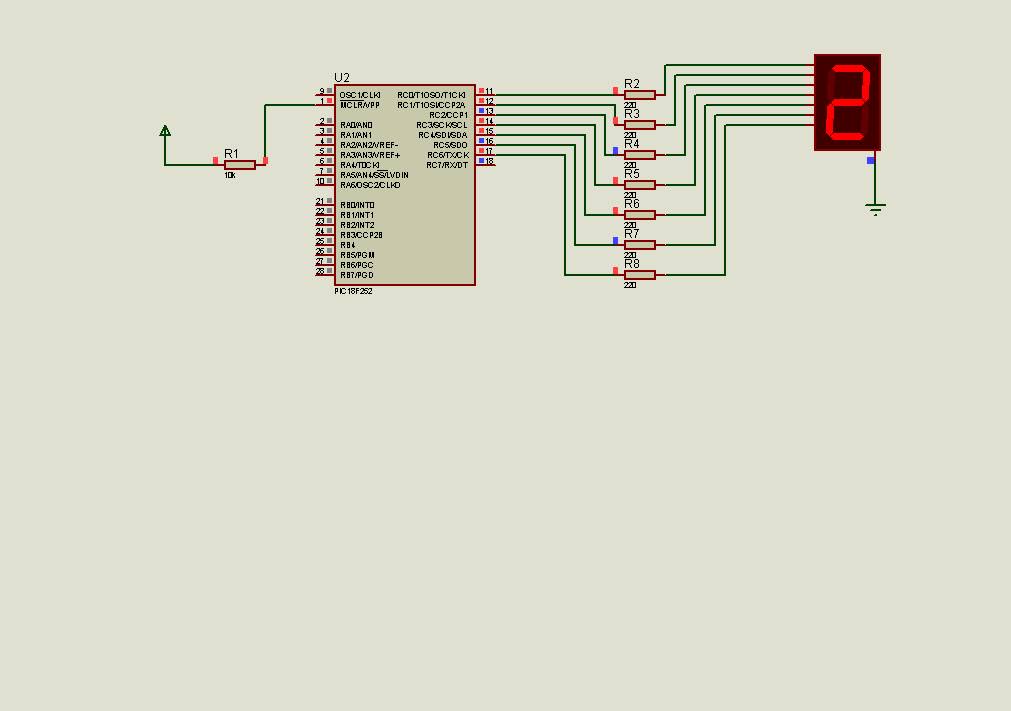
char segment[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
int i=0;
TRISC=0;
PORTC=segment[0];
while(1)
{
delay_ms(500);
i=i+1;
if(i==10)i=0;
PORTC=segment[i];
}
}





Home workงานที่ 1
|
เกลียว ชนิดและส่วนต่างๆของเกลียว เกลียว ( Thread) หมายถึงสันหรือร่องที่เกิดขึ้นบนผิวงานวนไปรอบ ๆจะซ้ายหรือขวาก็ไดด้วยระยะทางที่สม่ำเสมอ เ...